Proporcional, Integral Derivativo
El lazo PID, Proporcional Integral y Derivativo, es un algoritmo usado para controlar sistemas con una entrada y una salida analógicas. Se ha convertido en el algoritmo más popular para este fin. Muchos controladores ya lo incluyen como una instrucción de su conjunto de instrucciones.
En un lazo PID están involucrados algunas variables tales como:
- La variable de proceso (vp) o variable que se quiere controlar
- La referencia o consigna (r), es el valor que se desea que tenga la variable de proceso
- La variable de control (vc), es la señal que ordena al actuador modificar el estado de la variable de proceso.
En la figura 1, se muestra un ejemplo del control de nivel de un tanque. En el ejemplo se puede apreciar: un transmisor de nivel, cuya salida es la variable de proceso; un panel de operación por medio del cual el operador configura el valor de la referencia; un controlador en el cual se ejecuta el algoritmo PID y una válvula proporcional que modifica el flujo de entrada del tanque haciendo que el valor del nivel sea mayor o menor. En este ejemplo, si el nivel está por debajo del valor de referencia, el algoritmo PID incrementa la variable de control para abrir la válvula en incrementar el flujo de entrada, lo que hace que el nivel se incremente.
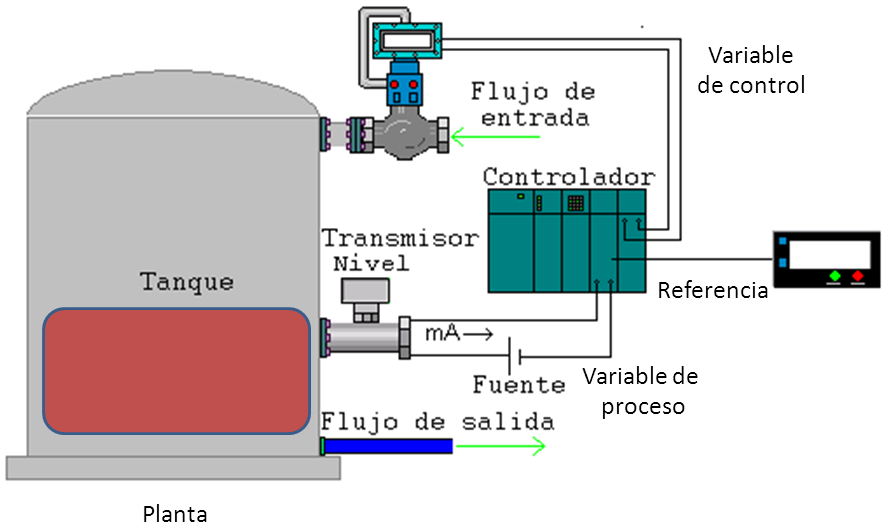
Figura 1. Control de nivel del tanque
Error del sistema
Internamente el controlador calcula la señal error (e) como la diferencia entre el valor de referencia y la variable de proceso (e = r-vp). La señal error es la entrada al algoritmo PID, el cual el cual se resume a resolver la ecuación:

Explicar cómo funciona el algoritmo implica profundizar en la teoría de control. En la figura 2 se muestra el sistema, en él se aprecian los bloques de control y la planta. La función de transferencia g1(t) es el algoritmo PID y la función de transferencia g2(t) es la resultante de las dinámicas del tanque y la válvula de control.
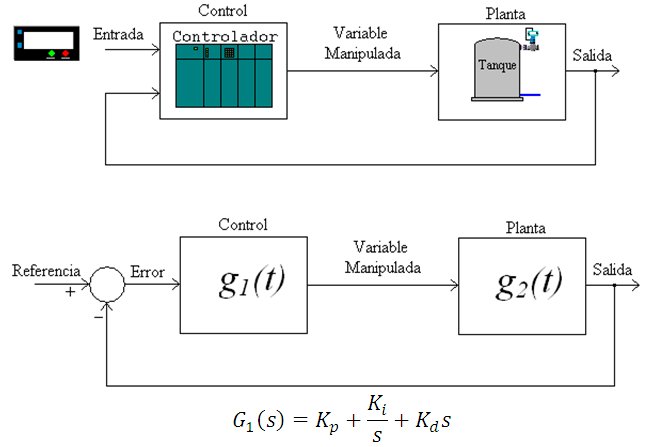
Figura 2. Diagrama de bloques
Algunas variantes en la ecuación PID
Modos de acción
La ecuación PID puede tener algunas variantes. En el ejemplo del tanque, si se cambia de lugar la válvula y se coloca en la salida del tanque en lugar de en la entrada de tanque, la válvula controlaría ahora el flujo de salida. Si la variable de proceso, el nivel para el ejemplo, es menor que el valor de referencia, ahora se necesita cerrar la válvula para que el nivel incremente su valor. Este caso es conocido como modo de acción directo y el error se calcula ahora como e = vp-r, a diferencia del modo anterior el cual es llamado modo de acción inverso.
Ganancias dependientes
Si en la ecuación de PID se saca como factor común la constante proporcional, la ecuación se ve como sigue:

Donde Ti es llamado tiempo integral y Td es llamada tiempo derivativo. En esta ecuación las tres ganancias, proporcional, integral y derivativo, dependen de Kp. A esta forma de la ecuación se le denomina ecuación de variables dependiente, a diferencia de la ecuación anterior que es conocida como ecuación de variables independientes.
Bias y la derivada de la variable de proceso
En ocasiones se puede requerir que desplazar el valor de la variable de control. Esto se hace sumando un valor al cual se le denomina bias. Si el valor de la referencia es constante, entonces la derivada del error es igual a la derivada de la variable de proceso, así que la ecuación PID también puede verse de la siguiente manera.
![]()
Sintonizar un lazo PID
La finalidad del lazo es hacer que el valor de la variable de proceso sea igual al valor de referencia. El algoritmo funciona adecuadamente cuando tiene el valor correcto de las ganancias proporcional, integral y derivativa. Esto es lo que se conoce como sintonizar el lazo.
En todo proceso de sintonizar se cambia los valores de las constantes, se varía el valor de referencia y se mide la respuesta. Es un proceso que puede ser iterativo, dependiendo de las herramientas con que se cuenten y la información que se tenga del proceso.
Hay varias forma de sintonizar un lazo. Existen software diseñados para esto, los cuales estiman las dinámicas del proceso por la respuesta obtenida ante la variación de la referencia. Otros métodos están basados en la teoría de control, como por ejemplo el de Zieglers y Nichols. Estos métodos son una buena alternativa pero, en ocasiones requieren llevar al proceso a condiciones que en la práctica no son posibles, como hacer que el sistema se haga oscilatorio. También es posible que se requiera tener información de las contantes de tiempo de la planta. En algunos casos se requiere alguna inversión en dinero adicional, como en el caso del software, que necesita ser comprado. A mi entender el mejor de los casos es cuando el fabricante de las planta te suministra el valor de las constantes que debes colocar en el algoritmo, lamentablemente, esto casi nunca ocurre.
En conclusión, la mayoría de las veces en la que tenemos que sintonizar un lazo PID, debemos hacerlo de forma manual, o al menos en mi experiencia. Vamos a mostrar como sintonizar un lazo de forma manual. Primero mostraremos algunas características importantes en una gráfica de respuesta de un lazo PID.
Característica de las respuesta a un Lazo PID
La figura 3 muestra una gráfica con la repuesta típica de la variable de proceso en una lazo PID. En la figura se puede apreciar algunas características como lo son: el sobre impulso, oscilaciones, el error en estado estacionario, y los tiempos de subida y establecimiento. El sobre impulso y las oscilaciones son síntomas de la estabilidad del sistema. El tiempo de subida y establecimiento nos indican la velocidad de respuesta, en un sistema ideal se necesita que sea estable, rápido y con cero error.
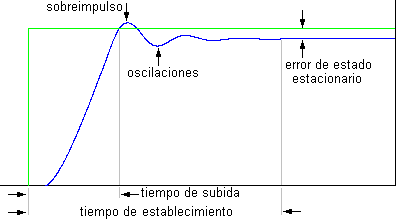
Figura 3. Respuesta del lazo PID.
Sintonizar manualmente un lazo PID
A continuación se describe el procedimiento para sintonizar el lazo PID:
- Se colocan todas las constantes a cero.
- Se incrementa la constante proporcional hasta que obtener una respuesta lo más parecido a la respuesta deseada. En este punto es posible que aparezca sobre impulso u oscilaciones,. Probablemente el error en estado estacionario sea diferente de cero.
- Para corregir el error en estado estacionario se debe ajustar la constante integral. Es posible que aumenten el sobre impulso y las oscilaciones.
- Para reducir el sobre impulso y las oscilaciones se ajusta la constante derivativa.
El siguiente video muestra un ejemplo de cómo sintonizar el lazo PID del ejemplo del tanque.

muy buen aporte Gracias!!!
Buen articulo
Saludos!
Hola.
muchas gracias por la aportación.
¿que valores usas para el escalamiento en la instrucción PID?
Saludos!
Buena pregunta. Se dejaron los valores por defecto. Variable de proceso max(4095 – 4095), Min(0 – 0). y para la salida Max(100 – 100), minimo (0-0)
anda ya
Muchas gracias profesor, me ah sido de mucha ayuda su articulo.
Que opinan de herramientas para ajuste de ganancias como:
https://pidtuner.com/
La información esta muy buena. en el párrafo de Ganancias dependientes. la narración confunde cuando dice: » A esta forma de la ecuación se le denomina ecuación de variables dependiente, a diferencia de la ecuación anterior que es conocida como ecuación de variables dependientes.»
Ramón, tiene mucha razón, ya lo corregí. Este tipo de comentarios son lo que hacen posible que los articulos mejoren.
Gracias
en el simens abra un video
Que modelo de Siemens usas?
Excelente información, saludos profe.
Gracias Efrain. Saludos
Gran post.