Photoelectric sensors, also called optical, base their operation on the emission of a beam of light, this is interrupted or reflected by the object to be detected, in other words they detect the presence of an object through a light beam. They have many applications in the industrial field and are widely used. They are typically composed of a light source, a light receptor, optical devices for guiding the light beam (lenses) and an output circuit.
Light source
Usually a LED of a wavelength which is usually located within the range in the spectrum including visible and infrared light. Infrared radiations emitted higher percentage of light and dissipate less heat. LEDs that emit a visible light beam have the advantage that facilitates the alignment of the sensor. Red light LEDs are most commonly used among LEDs of the visible light.
Sometimes the light beam is modulated with pulse. The modulation has the advantages of more light in the beam, longer useful life, and immunity of the sensor to other light sources that can interfere with the signal, however, it has disadvantage of reducing the frequency response of the sensor.
Receptor
It is usually a phototransistor. The receptor must be spectrally coupled with the transmitter; this means that the phototransistor must allow greater current flow when the wavelength received is equal to the LED on the emitter. The receptor receives the light pulses in sync with the transmitter, which allows ignoring radiation from other sources. This type of synchronous reception is possible only when the source and receptor are in the same package. At the receptor, also there is a circuit which conditions the signal before reaching the output circuit.
Lenses
Their function is to direct the beam of light in both the source and receptor to restrict the field of view, this results in increased detection distance. The base area of the cone beam increases with distance. Using a lens can generate a very narrow cone, which would give more scope to the sensor but with the drawback of having more difficulty at the time of align. Some detectors are designed to have a wide field of view, it can detect large objects, but at relatively short distances.
Output circuit
There are several types of discrete or digital outputs.
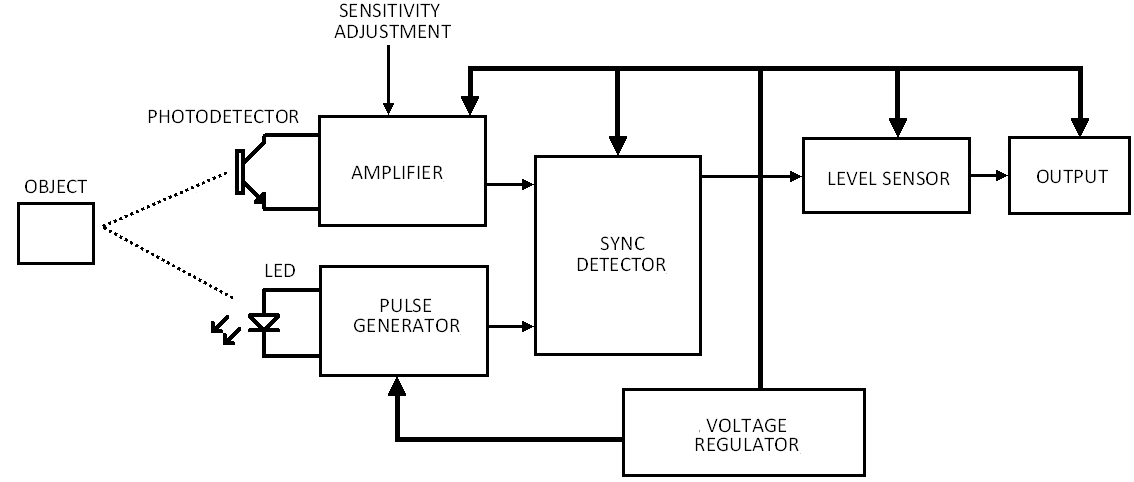
Diagram Block Photoelectric Sensor
Detection modes
Photoelectric sensors have three operating modes: transmitted beam, reflective and diffuse.
Transmitted beam
El emisor se coloca en frente del receptor y el objeto es detectado cuando pasa entre ambos. Esta configuración tiene la ventaja de alcanzar grandes distancias de detección (hasta unos 250 m). Su principal desventaja se presenta durante la instalación en campo, debido a que el emisor y el recepto deben ser alineados, además de requerir mayor cantidad de cables.
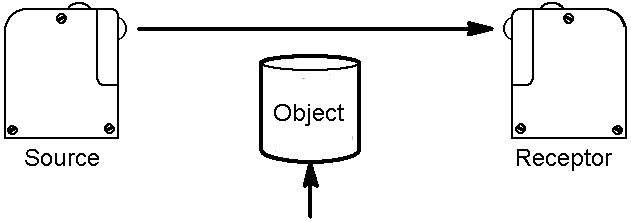
Transmitted Beam Mode
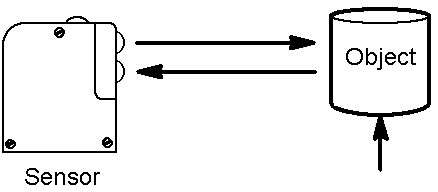
Reflective
The source and receiver are placed in the same package next to each other and in front of them a reflective surface is placed. The light beam emitted strikes the reflective surface and is detected by the receptor. Detection occurs when the object prevents the light beam reaches the reflective surface and hence to the receptor.
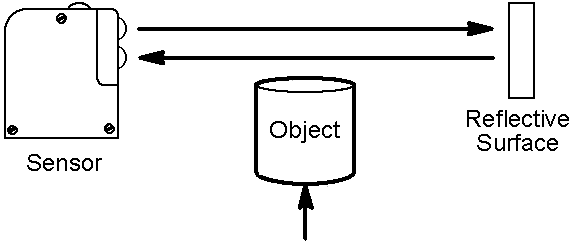
Reflective Mode
Reflective type detectors can present problems when the object to be detected is very bright due to the beam always reaches the detector. In such cases it is useful to use reflective polarized sensors. These types of detectors have a filter in the source and another, 90° out of phase in the receptor. When the polarized light beam strikes the reflective surface, this depolarizes the beam and the receptor detects a portion of the reflected light. When the shiny object passes in front of the detector, light is reflected without depolarization and the filter in the receptor prevents to light from passing, what cause the detection. Polarized sensors have between 30 and 40% less range than reflective sensors non polarized.
Diffuse
In this configuration, the sensing object is who reflecting the beam of the light. For opaque objects can be detected, the light beam is emitted in various directions. This configuration has the disadvantage of having very short detection distance, but it is very useful when it is difficult to access both sides of object.
Diffuse Mode
Fiber optics
In the above configurations can be installed optical cables or optical fibers so as to achieve some improvements since the fiber can be placed in tight spaces which do not fit the sensors and can also withstand higher temperatures up to about 500 ° C. These optical fiber cables can be glass or plastic fiber.
Photoelectric sensor specifications
Light/Dark Operate
The light operation refers to the operation way in which the sensor output is activated when the beam of light arrives to the receptor. The operation in darkness operates in a completely opposed way; the output is energized when the beam of light does not arrive to the receptor.
Maximum sensing distances
This is a parameter given by the vendor and it refers to:
- The distance between the source and the receptor in the transmitted beam sensors.
- The distance between the source/receptor and the reflector in the reflective sensors.
- The distance between the source / receptor and the object in the diffuse sensors.
Minimum Sensing Distance
Most reflective and diffuse sensors have a blind area within which cannot be detected, there is a region between the sensor and the minimum sensing distance in which an object can not be detected.
Hysteresis
The hysteresis of a photoelectric sensor is the difference between the distance at which an object can be detected as it moves towards the sensor and the distance that stops being detected when the object moves in the opposite direction.