El sensor fotoeléctrico, también llamados óptico, basa su funcionamiento en la emisión de un haz de luz que es interrumpido o reflejado por el objeto a detectar. En otras palabras detectan la presencia de un objeto por medio de un haz de luz. Tienen muchas aplicaciones en al ámbito industrial y son ampliamente utilizados. Típicamente están compuestos por una fuente de luz, un receptor de luz, dispositivos ópticos para guiar el haz de luz (lentes) y un circuito de salida.
Fuente de luz
Usualmente es un LED con una longitud de onda que normalmente se encuentra dentro del rango en el espectro que incluye luz visible e infrarroja. Las radiaciones infrarrojas emiten mayor porcentaje de luz y disipan menos calor. Los LED que emiten un haz visible de luz tienen la ventaja que facilitan la alineación del sensor. Entre los LED de luz visible los más usados son los de luz roja.
En ocasiones el haz de luz es modulado con pulsos. La modulación presenta las ventajas de mayor luminosidad en el haz, mayor vida útil del LED, inmunidad del sensor a otras fuentes de luz que puedan interferir con la señal, sin embargo tiene desventaja de reducir la respuesta en frecuencia del sensor.
Receptor
Usualmente es un fototransistor. El receptor debe estar acoplado espectralmente con el emisor. Esto significa que el fototransistor que se encuentra en el detector debe permitir mayor circulación de corriente cuando la longitud de onda recibida sea igual a la del LED en el emisor. El receptor recibe los pulsos de luz en sincronía con el emisor, esto permite ignorar radiaciones provenientes de otras fuentes. Este tipo de recepción sincrónica sólo es posible cuando la fuente y el receptor están en el mismo encapsulado. En el receptor, además, existe un circuito que acondiciona la señal antes de llegar al circuito de salida.
Lentes
Tienen la función de dirigir el haz de luz en el emisor y en el receptor para restringir el campo de visión. Esto trae como consecuencia aumentar la distancia de detección. El área de la base del cono de haz emitido por el LED aumenta a mayor distancia. Utilizando un lente se puede generar un cono muy estrecho, lo que permitiría darle más alcance al sensor pero con el inconveniente de presentar mayor dificultad en el momento de alinearlo. Algunos detectores son diseñados para tener un amplio campo de visión, esto permite detectar objetos grandes, pero a distancias relativamente cortas.
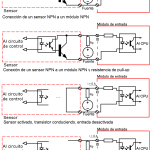
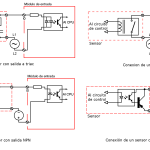
Circuito de salida
Existen varios tipos de salidas discretas o digitales.
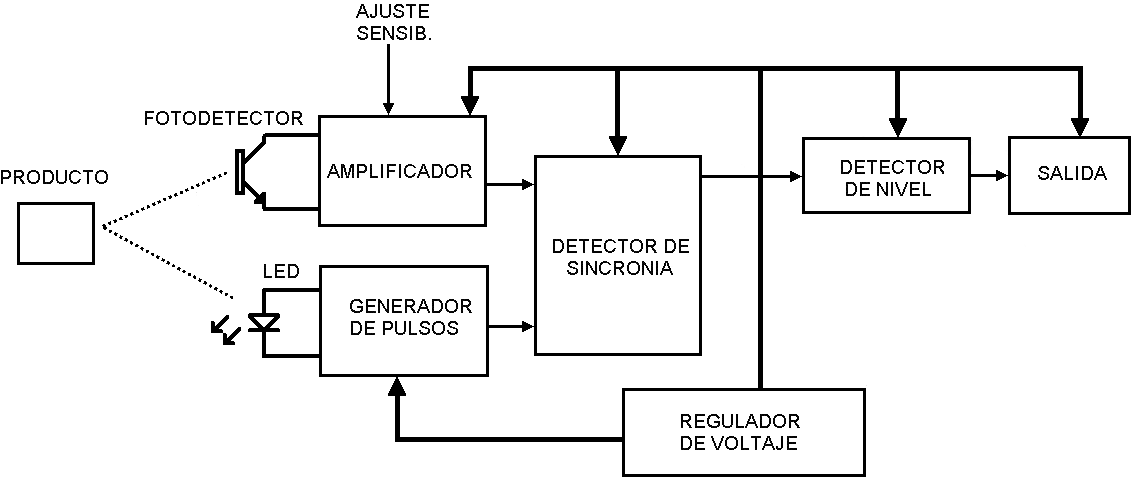
Diagrama de bloques de un sensor fotoeléctrico.
Modos de detección
El sensor fotoeléctrico se colocan en tres configuraciones diferentes estas son: Transmisión directa, reflexivo y difuso.
Transmisión directa o barrera
El emisor se coloca en frente del receptor y el objeto es detectado cuando pasa entre ambos. Esta configuración tiene la ventaja de alcanzar grandes distancias de detección (hasta unos 250 m). Sus desventajas son la alineación del emisor y el receptor y la cantidad de cables para la conexión.
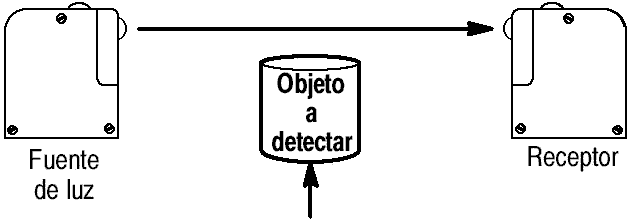
Modo transmisión directa
Reflexivo
El emisor y el receptor se colocan en el mismo encapsulado y en frente de ellos se coloca una superficie reflexiva. El haz de luz emitido choca contra el reflector para ser detectado por el receptor. La detección ocurre cuando objeto impide que el haz de luz llegue hasta la superficie reflexiva y en consecuencia hasta el receptor.
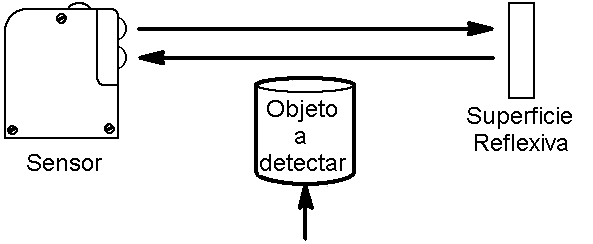
Modo reflexivo
Los detectores de tipo reflexivo pueden presentar problemas cuando el objeto a detectar es muy brillante ya que el haz de todas formas llega al detector. En estos casos es muy útil usar sensores reflexivos polarizados. Este tipos de detectores tienen un filtro en el emisor y otro, desfasado 90º, en el receptor. Cuando el haz de luz polarizada choca con la superficie reflexiva, éste despolariza el haz y el receptor deja pasar parte de la luz reflejada. Cuando el objeto brillante pasa frente al detector la luz se refleja pero sin despolarizase y el filtro colocado en el receptor impide que la luz pase lo que ocasiona que el objeto sea detectado. Los sensores polarizados tienen entre 30 y 40 % menos alcance que los sensores reflexivos sin polarizar.
Difuso o proximidad
Esta configuración se parece a la reflexiva. El objeto a detectar es el que refleja el haz de luz. Para lograr que objetos poco brillantes puedan ser detectados, el haz de luz no se transmite en una sola dirección como en las configuraciones anteriores, sino que viaja en varias direcciones. Esta configuración presenta la desventaja de tener muy corta distancia de detección, pero es muy útil cuando es difícil acceder ambos lados de objeto.

Modo difuso
Fibras ópticas
A las configuraciones mencionadas, se les puede instalar cables ópticos o fibras ópticas. De de esta forma se logra acceder a espacios muy reducidos. Además pueden soportar mayores temperaturas, hasta unos 500ºC. Estos cables ópticos pueden ser de fibra de vidrio o de fibra de plástico.
Especificaciones de un sensor fotoeléctrico
Operación luz/oscuridad
La operación luz se refiere al modo de funcionamiento en el cual la salida del sensor se activa cuando el haz de luz llega al receptor.
La operación en oscuridad opera de forma totalmente opuesta. La salida se activa cuando el haz de luz no llega al receptor.
Distancia máxima de detección
Este es un parámetro dado por el fabricante y se refiere a la distancia entre:
- El emisor y el receptor en los sensores de haz transmitido.
- El emisor/receptor y el reflector en los sensores reflexivo.
- El emisor/receptor y el objeto en los sensores difusos.
Distancia mínima de detección
La mayoría de los sensores reflexivos y difusos tienen un área ciega dentro del cual no pueden detectar. Existe una región entre el detector y la distancia mínima de detección en donde el objeto no es detectado.
Histéresis
La histéresis de un sensor fotoeléctrico es la diferencia entre la distancia en la que se puede detectar un objeto a medida que se mueve hacia el sensor y la distancia que se tiene que mover en dirección opuesta al sensor para que deje de ser detectado.